... ferment the Tofu?
I though it a decent introduction initially but now it seems silly. Why the heck did I name this guy Tofu. I was originally going to name it "War Machine" because of the dull grey metal colors matching that of the Iron Man counterpart. But I named it Tofu as a standing name, and now the admins on the
RFL won't change it. Bah. Regardless, Tofu will represent the pinnacle of my ability at this point in my career.
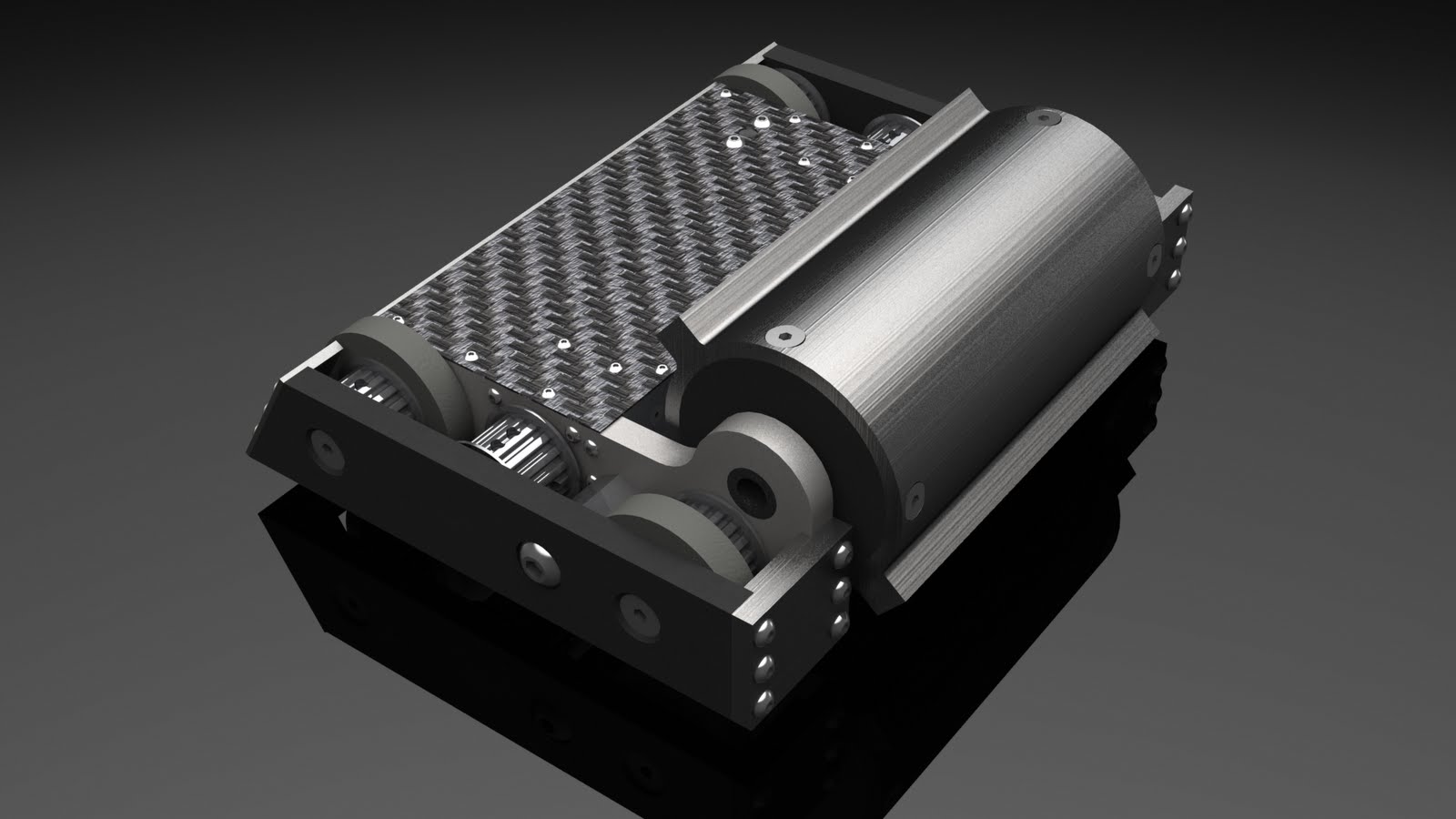
Tofu:
- 12-pound combat robot
- hardened tool steel outer armor / 2024 inner frame
- slotted frame pieces
- single-piece stagger-tooth drum
- custom integrated brushless motor technology
- pioneered "stuffed drum" technique
- re-engineered drive gearboxes with hot wind motor swap (maybe neo magnets)
No doubt it will be a pricey project, but this hobby is hardly cheap. Instead of cutting corners or bargaining desired features in parts like on "Attrition", I want to put in every design feature into this robot. More proof of concept than "combat competence". I basically want to make sure that my designs perform completely as intended, and leave no feature (or lack thereof) to chance. Think of it as a 8" square experience resume.
Anyway, onto the good part. Here is a render and some good pictures:


Tofu will use a few of Attrition's old parts. The
BB 12-45 escs are still good. The stator and magnet can from the previous brushless drum is also still in good shape but I would like to reduce the number of turns for a higher RPM drum. The Team
Whyachi MS-05 power switch is also in pristine condition but that is expected from a simple (and expensive) device. All in all, that saves about $150, so I can't complain. You are rewarded for taking care of your electronics (isn't that ironic how I am putting them through intentional abuse?).


The 32mm
Transmotec gearboxes are also still good although their motor mounting plates are starting to strip out so I will have to remake them.
While I remake them I will also make them better! Here I replace the circular mount with a square one consistent with the thickness of the body of the robot. Although being larger, the square interface acts as an additional support for the motor, so the whole thing won't shake so damn much, which was a HUGE problem with Attrition. Rear motor clamps will also be added for rigidity.
The next real competition for Hobbyweight class robots will be in Feburary at
Motorama in PA. Time to get started.
Note: These pictures are pretty old. I developed the designs in the Spring and have been updated since. I'll make an updated post soon enough.
 I am proud to announce the final screws have been added. "Tofu" design is now complete and I can theoretically begin manufacturing.
I am proud to announce the final screws have been added. "Tofu" design is now complete and I can theoretically begin manufacturing.






 Tofu will use a few of Attrition's old parts. The BB 12-45 escs are still good. The stator and magnet can from the previous brushless drum is also still in good shape but I would like to reduce the number of turns for a higher RPM drum. The Team Whyachi MS-05 power switch is also in pristine condition but that is expected from a simple (and expensive) device. All in all, that saves about $150, so I can't complain. You are rewarded for taking care of your electronics (isn't that ironic how I am putting them through intentional abuse?).
Tofu will use a few of Attrition's old parts. The BB 12-45 escs are still good. The stator and magnet can from the previous brushless drum is also still in good shape but I would like to reduce the number of turns for a higher RPM drum. The Team Whyachi MS-05 power switch is also in pristine condition but that is expected from a simple (and expensive) device. All in all, that saves about $150, so I can't complain. You are rewarded for taking care of your electronics (isn't that ironic how I am putting them through intentional abuse?).






