On Black Friday, I bought this Razor-A scooter for $17. Now why would I waste my money on a scooter built for 5 year-olds(+)?
So I could concatenate one of these with it:
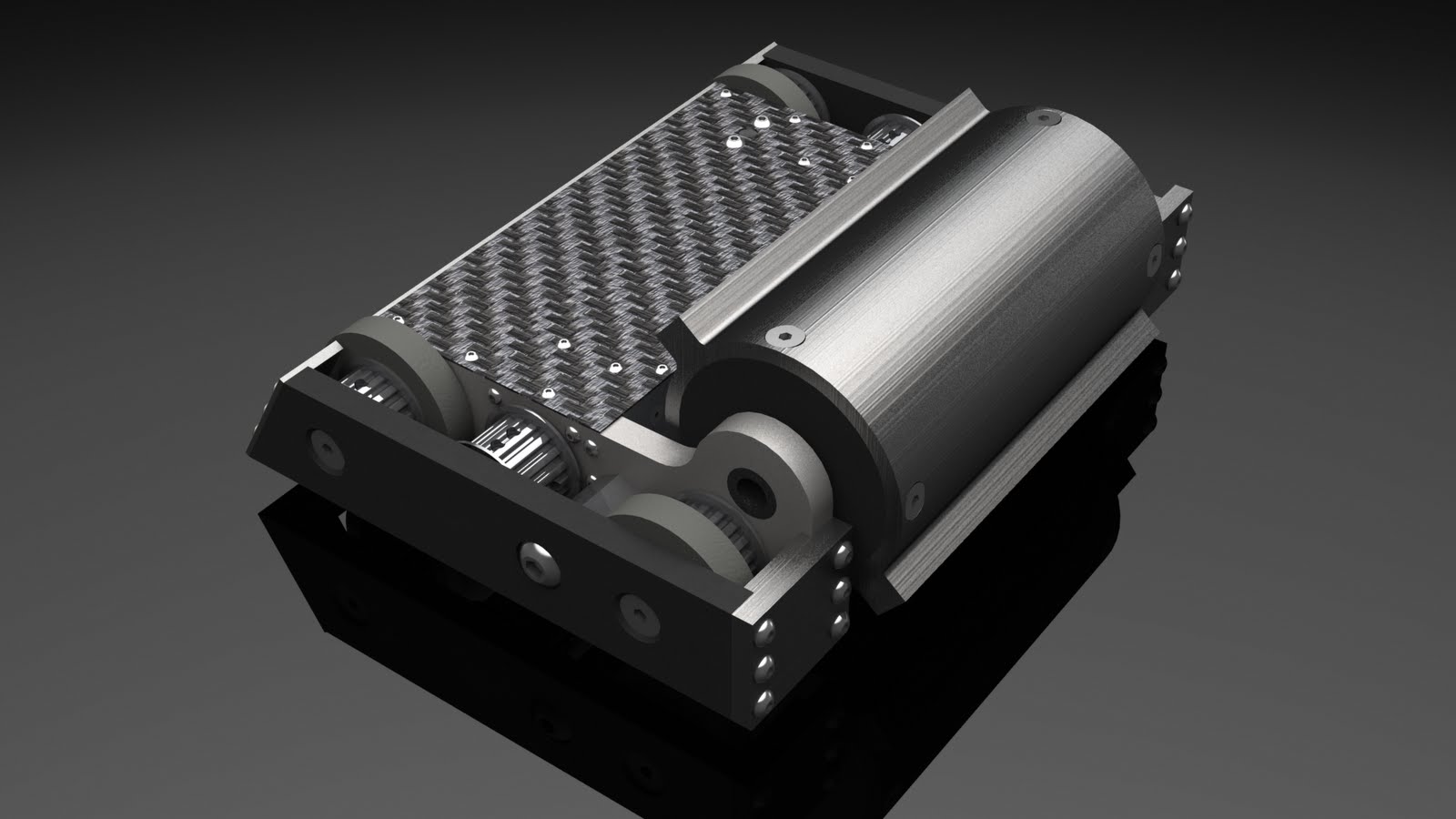
 That is a 24v, 400W Kollmorgen brushless sensored motor that weighs 5-6 lbs. It is made for electric bicycles and weighs more than the scooter frame. Finally, it is larger in diameter (~5") than the scooter wheels (98mm ~ 4").
That is a 24v, 400W Kollmorgen brushless sensored motor that weighs 5-6 lbs. It is made for electric bicycles and weighs more than the scooter frame. Finally, it is larger in diameter (~5") than the scooter wheels (98mm ~ 4").Needless to say, this is a project of epic disproportions! Yet, I still want to be manageable so I can actually use it in my cross campus commutes. Here's the game plan:
I am going to make an extended under body to house the batteries and extend the length so I can have some foot space and motor mounting provisions. Tentative model:

The wheel will be chain driven (#25) at about a 2:1 ratio. The frame thickness about the body is 1.25". The spoiler on the back is not for down force but rather acts as a foot rest because the frame is so small (seriously, the frame can only fit one of my feet lengthwise). Everything has slots, T-nuts, and delicious waterjetting. This will require major frame modifications too. The rectangular extruded frame will need to be cut on the bottom to allow the battery to hide inside. Also, some of the flanges on the side will need to be cut off because I need a flat surface to bolt the aluminum plates. Each operation removes from the structural rigidity of the frame which worries me.
Now one decision I am regretting is making the front segment from 1/4" polycarbonate. Why on earth would I make such an important part from (thin) plastic? Well because I already had it on hand. I'm in college and money doesn't grow in trees. I am worried about it bending or snapping somewhere in that region. I would run FEA on the part, but I have no idea what grade of shit-luminum Razor uses on their scooter.
 Lots of pretty parts. The front of the undercarriage is made already from pre-existing plates of polycarb. Longpack and Macromotor wait in the wings...
Lots of pretty parts. The front of the undercarriage is made already from pre-existing plates of polycarb. Longpack and Macromotor wait in the wings... And here is the integrand. One razor scooter awaiting cosmetic surgery...
And here is the integrand. One razor scooter awaiting cosmetic surgery...Anyway, A lot of building happened in the span of three days and magically the project is done! My phone actually ran out of batteries so I couldn't take any build pictures. :(
Sorry folks, all you get are end result pics and video!

Sitting pretty by my fridge(s).

The throttle is a 5k pot with a shaft hub from Servo City. I should enclose those wires sometime soon.

The rear module. You can tell it is slightly different from the original CAD because I had forgotten which direction the motor spun. This made for a very disappointing initial ride test.

Closeup of the slot and tab T-Nut design. I experimented with the tool offsets on the waterjet such that it is a perfect slide with higher quality cuts. Are you proud of me Charles?

The underside. Notice where the metal becomes polycarb. I expect this region to be first to fail because it sits in between the two wheels and theoretically supports the entire rider's weight.
It has more than enough power to flip a rider over and reaches a top speed of ~20mph (calculated as 3500rpm on a 98mm wheel). It is amazingly unsafe...
... so I shall call it, "Safety Razor"