So if you want to see more consistent updates, I suggest you go there and follow :P
_________________________________________________________________________________
Prelude:
Long long ago, I built a hobbyweight with the help of fellow bot people like Brian Schwartz and Casey Kuhns. This was back in 2008 which for me was high school and my resources were limited so I would like to take yet another moment to thank those mentioned above. However, I did not blog about it because my blog did not yet exist. Later versions of the robot were also gone unmentioned (such as my Motorama '13 and Motorama '14 posts). I find it now necessary to log the development of this power-dense combat robot.
2008-2009:
This robot was a drum spinner (as was the flavor of the month) and was a wonderful blend of scavenged robot parts. It used a set of 5:1 'mabuchi' gearmotors I scored from ebay, a set of BB 12-45 escs I bought off a leaving bot member, and batteries given for doing a favor for another bot member. I bought a 40 mm copier stator to wind the brushless motor and had machining help as mentioned above. Furthermore, I had machining services donated by local companies to make my drum, an odd combination of 4130 for the drum body and A2 tool steel.


Please for heavens sake do not weld those steels together. EVER. Looked okay but was difficult to heat treat you might imagine...

Either way, this was my first big bot I made and it debut at Motorama 2008 where it went 3 wins and 2 losses to Igoo and Surgical Strike.


It had many notable flaws:
- Banebots escs overtemp shutoff from the high current draw mabuchi gearmotors
- poor detail mechanical design and material choices allowed for bent frame and lockup
- weight distribution made for poor inverted driving (and poor ability to self-right)
- additional precautions to secure connectors also required
It was also the first robot I built featuring a custom made brushless-in-weapon system. I'll attribute the original idea to Corona and Skittlebaru but none have gone as far to put the esc inside. Will bales "Fluffy" came out later utilizing my old 5" drum idea having everything except the drive motors inside the drum. Lets just say there was a reason I didnt finish that version of Attrition. The things learned from this robot would carry in designs to come. Additional pictures from long long ago can be found here:
2012-2013:
By now I was in college at Georgia Tech. My activities at local events and Dragon Con had interested enough friends to justify the "Georgia Tech Fleet" to drive from Atlanta to Harrisburg for Motorama 2013. I dug Attrition out from storage and decided now was time to address its shortcomings.


I started from scratch. Time to apply new knowledge on mechanical design, materials, and even 3D modeling (since by then I had my SolidWorks professional certification). We would decrease the footprint to save weight and increase the durability of outer armor. For the same goal, we would also downgrade the weapon assembly. The gearmotors would have to go; Instead I picked up four higher reduction planetary units with 'long can 400' motors attached. This new version went by many names such as Tofu or War Machine but decided to keep it as Attrition to indicate its lineage.
Let's do some planetary gearbox math:
A single stage of a planetary gearbox can be calculated by:
(Ring + Center)/Center:1
Pinion :11 T
Sun: 17 T
Ring: 46 T
Stage 1: (46+17)/17:1
Stage 2: (46+11)/11:1
Overall: 19.24:1
This number was good according to my calculations should yield ~10 mph with my long can 400 motors.

To make everything compact, the keyword was 'integration'. I built the gearboxes into the frame rails to save space. The electronics were repackaged into a small cube to reduce wire space needed. I was able to find the perfect battery to sneak into the remaining space.


Drive test showed the robot was fairly nimble. I dont remember if I had switched to Banebots RS395 motors yet or not. Either way this video showed that I could not use round belts like I usually favor. On high acceleration moves like direction changes, the belts would slip. This made driving with the drum impossible as I later discovered. Later i switched to waterjet machined XL timing pulleys.

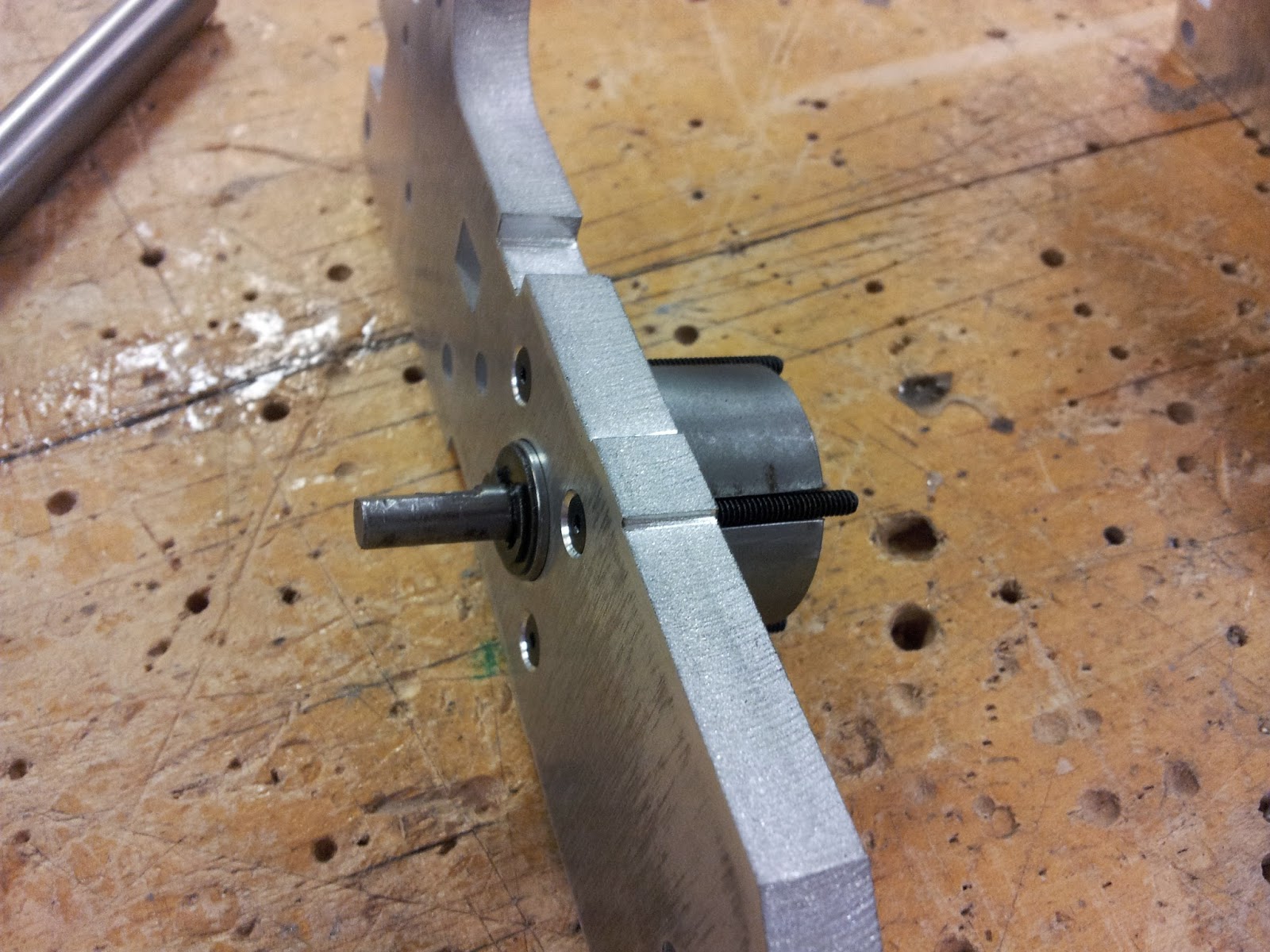
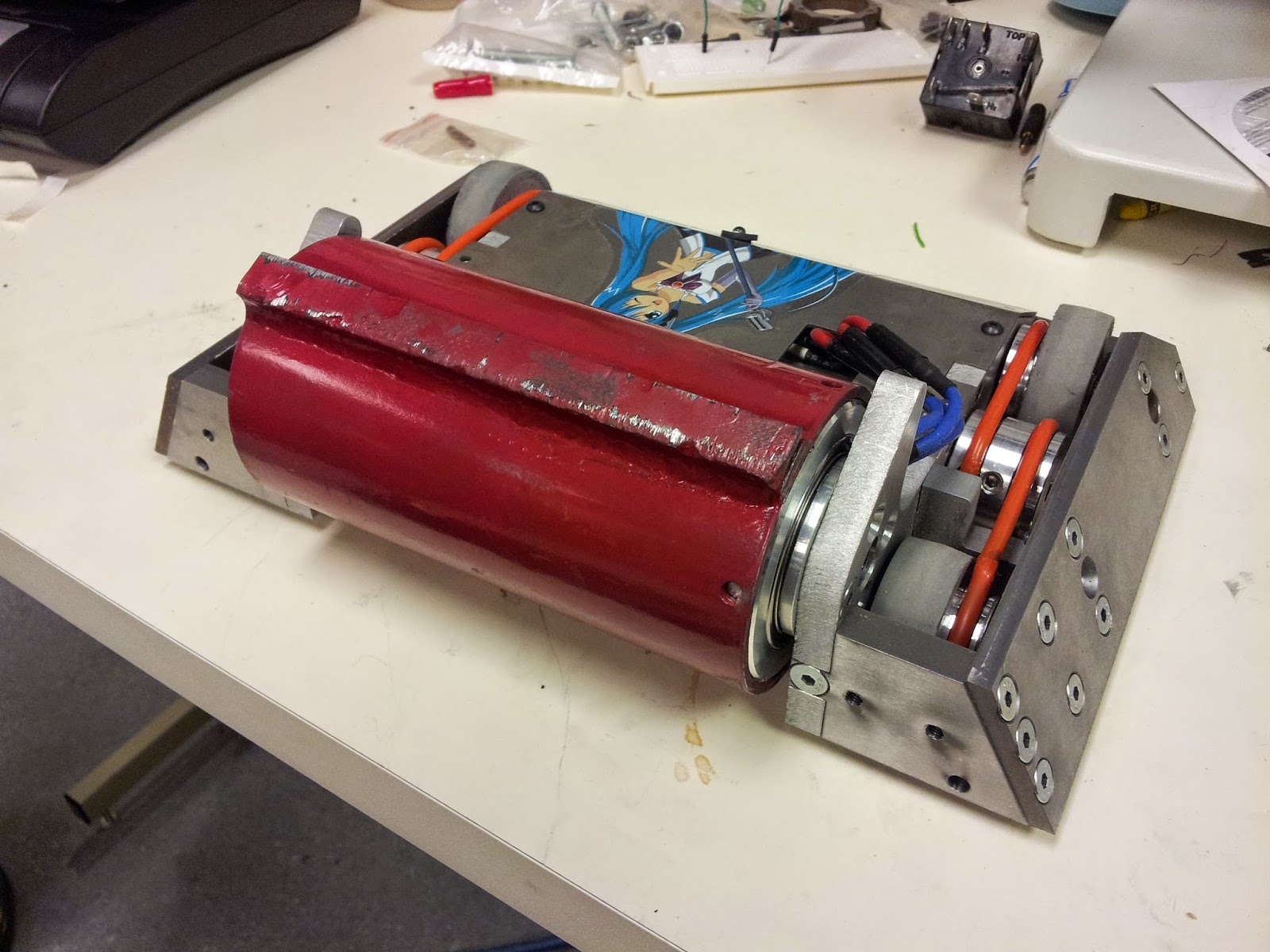
The drum was simple; I cut the original drum from Attrition reducing its length from 8" to 5.625". The motor was a bit more challenging. To simplify the design I kept the esc out of the drum. This was a decision made based on 'Cake's matches where the drum would break free and eat its signal or power wires. I also decided to not route wires inside the shaft. This was so I could preload the inner race bearing assemblies in the shaft for higher rigidity and high frequency performance. As such, the wires would exit with a new concept I had involving a large ring bearing on the motor side.
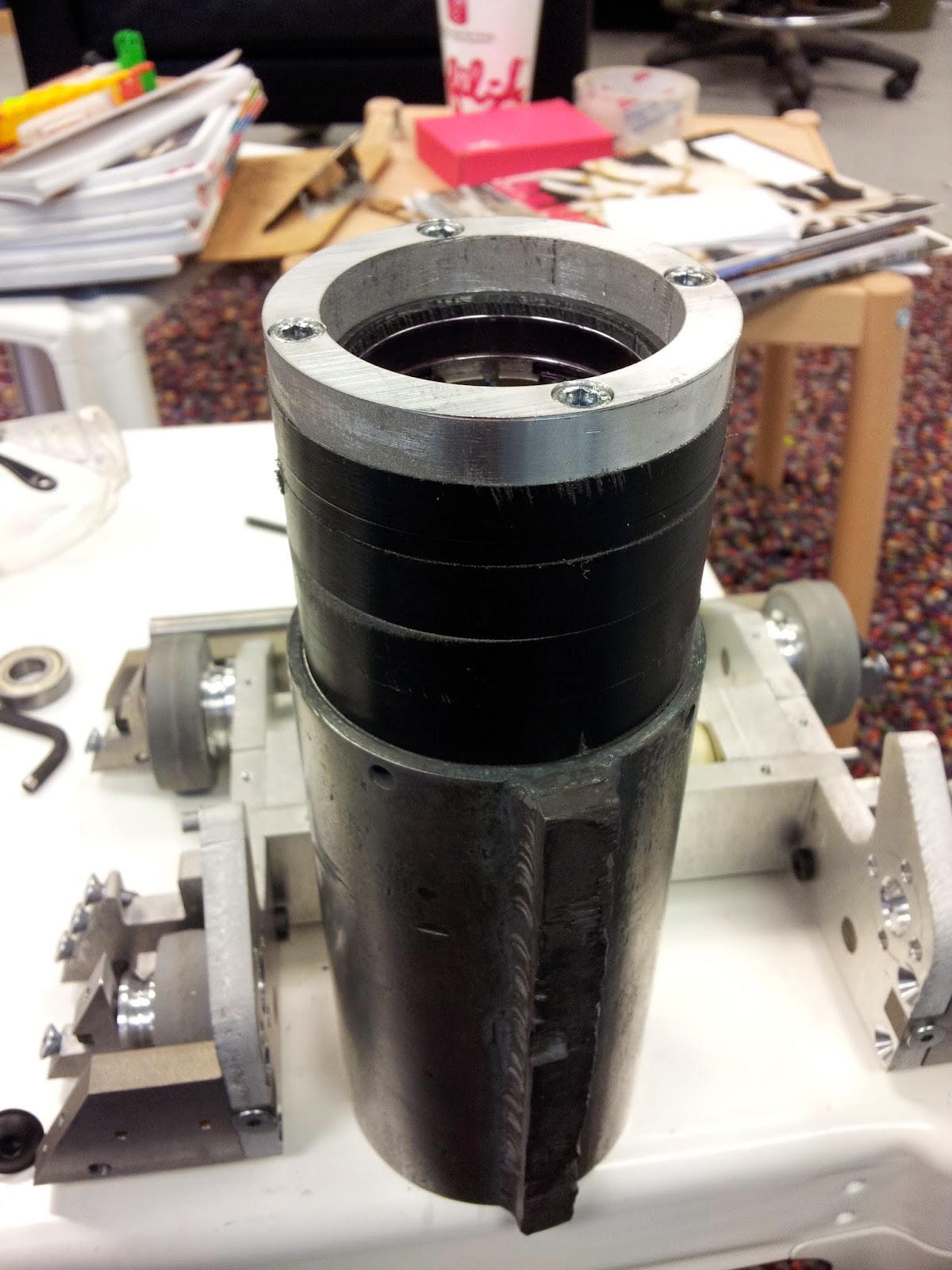



The original concept was to build the internals from several stacks of waterjet material. However the drum was a bit warped so any precision machined parts would not readily fit inside. I ended up wrecking a motor in an initial test and remachined the entire assembly from a single round of aluminum. Some fully assembled pictures.


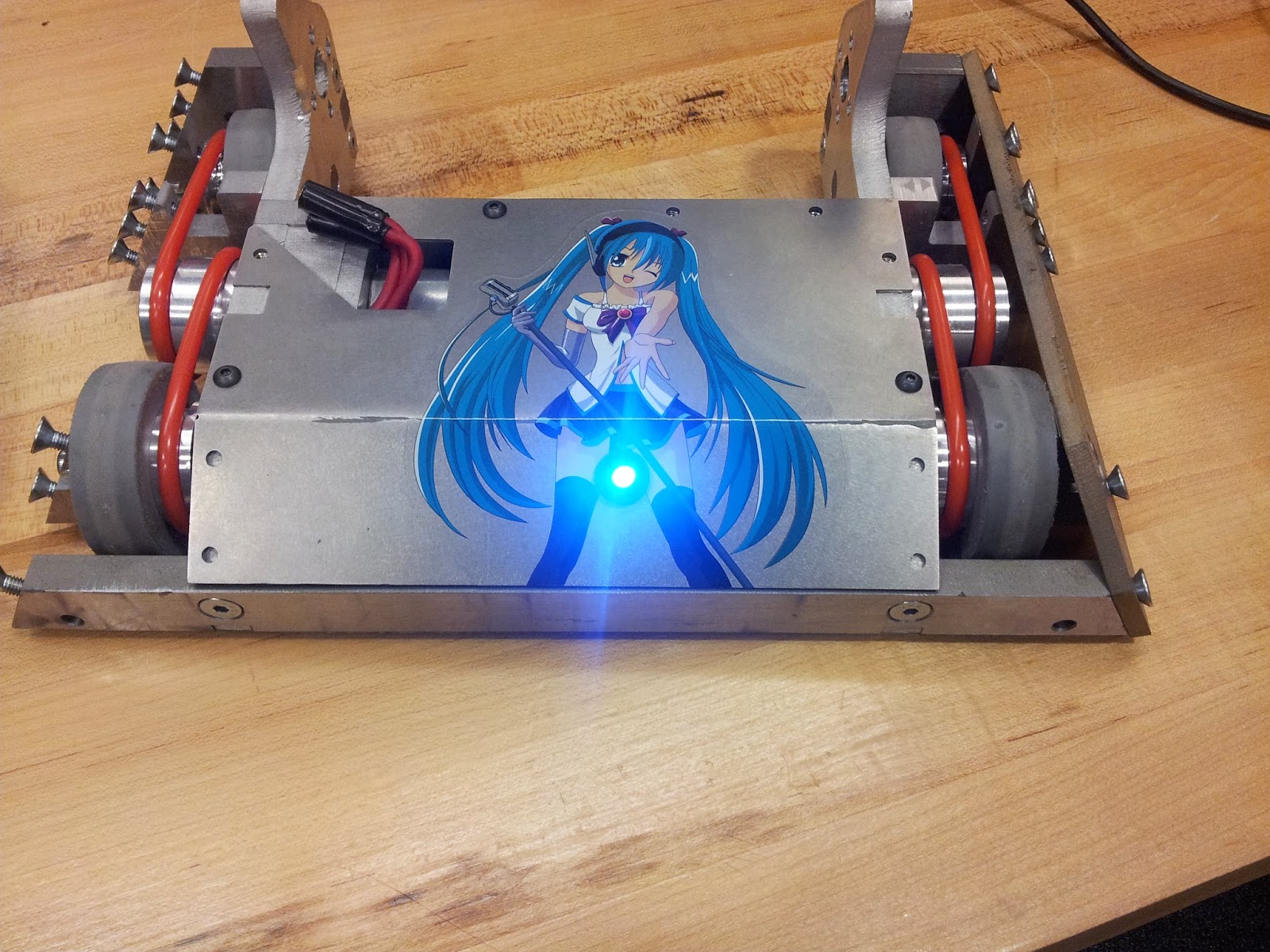
Now, time for the money shots! The LED vag was a nice touch too...

This version debut at Motorama 2013 where it faced a number of tough opponents including Zandor and the undefeated multi-time champion Cataclysm who won 2nd and 1st respectively. Attrition went 3 wins and 2 losses for 3rd place, going undefeated for 3 matches until he met Cataclysm on Sunday.


Somehow, Attrition came out in good shape. Aside from blemishes on the top and bottom plates, the majority components including the drum were fully operational. The source of my demise was actually lack of spares. After my match with Zandor in the quarter-finals, I was down one drive motor and went into the Semi-finals against cataclysm with only one drive side. This put me at a huge disadvantage and lost decisively. Shortly after, I lost the losers bracket finals to Zandor because of my lack of drive side. Originally the culprit was a broken magnet. The replacement given by another builder ended up failing also because of pinion slip.


2013-2014
Losses at Motorama 2013 were disappointing to say the least. This year's emphasis would be into the drivetrain. I wanted faster and more reliable. Now at MIT, I lost a valuable resource at the Georgia Tech Invention Studio. However my research afforded me new capabilities I would try and leverage when possible. In addition to remaking many outer armor plates, I also swapped the Banebots RS395 motors for the original long can 400 motors and remade the center timing pulleys from 3D printed material. I believed that high starting torque was the culprit for pinion slipping.




Another decal with lewd LED placement was needed.

As fate would have it, I was wrong. At Motorama 2014, Attrition went 3 wins and 1 loss in a round robin format for 2nd place. Agility was useful in my first match against the pneumatic flipper Jumbonator but I lost a drive side again after a win on Upchuck. This was a fatal blow against the strong drive of Isotelus Rex as I could not maneuver for a good hit. The FDM material actually split and rendered the center pulley useless. This was from the high stress concentrations near the 6mm drive shaft to the ~25mm center pulley. This could easily be fixed with a larger diameter intermediate made of metal.

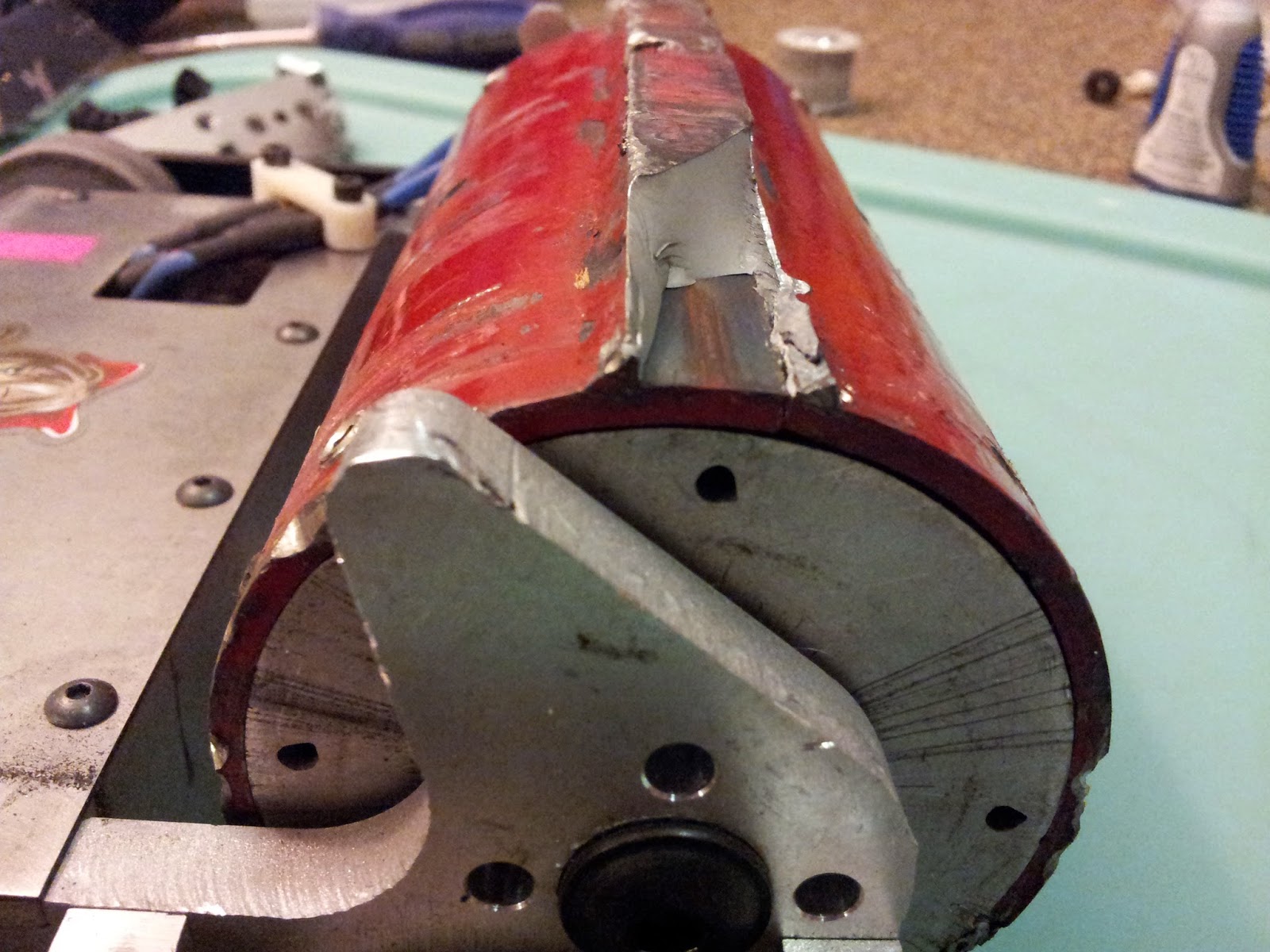

However, another defect surfaced that I had not predicted. The A2 teeth, after years of battle, finally broke during the match against Isotelus. I suspect this was due to fatigue as nothing on Isotelus could have done that. However I note that points were given to him for 'damage' to my robot as the judges pointed out when Attrition had finally spun down after the match. Closer inspection of the welds show little to no penetration into the wall; it was no wonder they had broken.
Present Day:
No place in 2008. 3rd place in 2013. 2nd place in 2014. This year we pull out all the stops. At Motorama 2015 we will go for the prize!
I here conclude this post as a documentation of my first 12-pound combat robot. In another post, I will summarize the efforts to prepare Attrition for Motorama this year which includes professionally made drums and extensive drive modifications.
Video of all Attrition's matches can be found as a playlist on my Youtube. I have placed the direct link below.
Hi! I stumbled across your blog after catching up on the Motorama results. As the builder of Solaris, it's great to see such a great looking drumbot. You're polishing the design well, congrats!
ReplyDeleteThanks! This is a huge compliment as you may notice many many many design elements stemmed from Solaris. I enjoyed reading and rereading your build reports as a kid and hope to continue the tradition.
DeleteWill post again later with videos of performance this year.
Hey Guys !
DeleteUSA Fresh & Verified SSN Leads AVAILABLE with best connectivity
All Leads have genuine & valid information
**HEADERS IN LEADS**
First Name | Last Name | SSN | Dob | DL Number |Address | State | City | Zip | Phone Number | Account Number | Bank Name
*Price for SSN lead $2
*You can ask for sample before any deal
*If anyone buy in bulk, we can negotiate
*Sampling is just for serious buyers
==>ACTIVE & FRESH CC FULLZ ALSO AVAILABLE<==
->$5 PER EACH
->Hope for the long term deal
->Interested buyers will be welcome
**Contact 24/7**
Whatsapp > +923172721122
Email > leads.sellers1212@gmail.com
Telegram > @leadsupplier
ICQ > 752822040
Nice article to sharing thanks to given java training in Chennai
ReplyDeleteIntelliMindz is the best IT Training in Coimbatore with placement, offering 200 and more software courses with 100% Placement Assistance.
DeletePython Course In Coimbatore
Digital Marketing Course In Coimbatore
sap mm training In Coimbatore
sap-fico-training-in-coimbatore
sap hana trainingIn Coimbatore
selenium Course In Coimbatore
seo training In Coimbatore
angular training In Coimbatore
aws training In Coimbatore
Excellent article..
ReplyDeleteInformatica online training in hyderabad
attrituton nce posts..
ReplyDeleteinformatica online training
ReplyDeleteThank you for your post. This is excellent information. It is amazing and wonderful to visit your site.
Android training in chennai
Ios training in chennai
ReplyDeleteThanks for posting useful information.You have provided an nice article, Thank you very much for this one. And i hope this will be useful for many people.. and i am waiting for your next post keep on updating these kinds of knowledgeable things...Really it was an awesome article...very interesting to read..please sharing like this information......
Web Design Development Company
Thanks for sharing this information. This is really useful. Keep doing more.
ReplyDeleteEnglish Coaching Classes in Chennai
Best Spoken English Institute in Chennai
Spoken English Course in Chennai
Best IELTS Class in Chennai
IELTS Training Institute in Chennai
IELTS Coaching Classes in Chennai
IELTS Classes near me
Wonderful blog with a lot of information. Looking forward for more such posts from you.
ReplyDeleteLINUX Training in Chennai | LINUX Course in Chennai | Best LINUX Training institute in Chennai | Best LINUX Training in Chennai | Learn LINUX | LINUX Certification | LINUX Course | LINUX Certification Courses in Chennai | LINUX Training
I believe that your blog will surely help the readers who are really in need of this vital piece of information. Waiting for your updates.
ReplyDeleteSelenium Training in Bangalore
Selenium Training Institutes in Bangalore
Selenium Course in BangalorePython Training Institutes in Bangalore
Python Institutes in Bangalore
Python Coaching in Bangalore
Thanks for sharing informative article. Asperina Technosoft is leading web development company offering professional service to customers across the globe at affordable price. Follow us at Facebook/.
ReplyDeleteReally great content. Thanks for taking time to share this with us.
ReplyDeletePlacement Training in Chennai
Placement Training Centres in Chennai
JavaScript Training in Chennai
JavaScript Course in Chennai
C C++ Training in Chennai
C Training in Chennai
Placement Training in OMR
Placement Training in Porur
Looking to add extra style to your content, make use of our strikethrough Text Generator to add amazing line through text in desired platform. Strikethrough in Google Docs.
ReplyDeleteI feel happy about and learning more about this topic. keep sharing your information regularly for my future reference. This content creates a new hope and inspiration with in me. Thanks for sharing article like this. the information which you have provided is better then other blog.
ReplyDeleteIELTS Coaching in Dwarka mor
Hello, I read your blog occasionally, and I own a similar one, and I was just wondering if you get a lot of spam remarks? If so how do you stop it, any plugin or anything you can advise? I get so much lately it’s driving me insane, so any assistance is very much appreciated.
ReplyDeleteData science Course Training in Chennai |Best Data Science Training Institute in Chennai
RPA Course Training in Chennai |Best RPA Training Institute in Chennai
AWS Course Training in Chennai |Best AWS Training Institute in Chennai
Devops Course Training in Chennai |Best Devops Training Institute in Chennai
Selenium Course Training in Chennai |Best Selenium Training Institute in Chennai
Advance Excel Training | Excel Training in chennai
I feel really happy to have seen your webpage and look forward to so many more entertaining times reading here. Thanks once more for all the details.
ReplyDeleteData science Course Training in Chennai |Best Data Science Training Institute in Chennai
RPA Course Training in Chennai |Best RPA Training Institute in Chennai
AWS Course Training in Chennai |Best AWS Training Institute in Chennai
Devops Course Training in Chennai |Best Devops Training Institute in Chennai
Selenium Course Training in Chennai |Best Selenium Training Institute in Chennai
Java Course Training in Chennai | Best Java Training Institute in Chennai
sharepoint training in Chennai | sharepoint Training Institute in Chennai
Thanks for giving great kind of information. So useful and practical for me. Thanks for your excellent blog, nice work keep it up thanks for sharing the knowledge.
ReplyDeleteAWS Training in Chennai | AWS Training Institute in Chennai
hank you for such a informative information.It will really helpfull for beginer to know the basic difference between linux and windows hosting.
ReplyDeleteThanks
Cpa offers
good keep it up
ReplyDeleteinterview-questions/aptitude/permutation-and-combination/how-many-groups-of-6-persons-can-be-formed
tutorials/oracle/oracle-delete
technology/chrome-flags-complete-guide-enhance-browsing-experience/
interview-questions/aptitude/time-and-work/a-alone-can-do-1-4-of-the-work-in-2-days
interview-questions/programming/recursion-and-iteration/integer-a-40-b-35-c-20-d-10-comment-about-the-output-of-the-following-two-statements
Effective blog with a lot of information. Ijust Shared you the link below for ACTE .They really provide good level of training and Placement,I just Had Digital Marketing Classes in ACTE , Just Check This Link You can get it more information about the Digital Marketing course.
ReplyDeleteJava training in chennai | Java training in annanagar | Java training in omr | Java training in porur | Java training in tambaram | Java training in velachery
I am so grateful for your article.Really looking forward to read more. Great.thanks for your efforts.
ReplyDeleteC and C++ Training Institute in chennai | C and C++ Training Institute in anna nagar | C and C++ Training Institute in omr | C and C++ Training Institute in porur | C and C++ Training Institute in tambaram | C and C++ Training Institute in velachery
I do agree your blog for quiz programming concepts, which is very helpful to grow up your knowledge. keep sharing more
ReplyDeleteAWS training in chennai | AWS training in anna nagar | AWS training in omr | AWS training in porur | AWS training in tambaram | AWS training in velachery
Hey Guys !
ReplyDeleteUSA Fresh & Verified SSN Leads AVAILABLE with best connectivity
All Leads have genuine & valid information
**HEADERS IN LEADS**
First Name | Last Name | SSN | Dob | DL Number |Address | State | City | Zip | Phone Number | Account Number | Bank Name
*Price for SSN lead $2
*You can ask for sample before any deal
*If anyone buy in bulk, we can negotiate
*Sampling is just for serious buyers
==>ACTIVE & FRESH CC FULLZ ALSO AVAILABLE<==
->$5 PER EACH
->Hope for the long term deal
->Interested buyers will be welcome
**Contact 24/7**
Whatsapp > +923172721122
Email > leads.sellers1212@gmail.com
Telegram > @leadsupplier
ICQ > 752822040
Thanks for one marvelous posting! I enjoyed reading it; you are a great author. I will make sure to bookmark your blog and may come back someday. I want to encourage that you continue your great posts, have a nice weekend!
ReplyDeletehadoop training in chennai
hadoop training in tambaram
salesforce training in chennai
salesforce training in tambaram
c and c plus plus course in chennai
c and c plus plus course in tambaram
machine learning training in chennai
machine learning training in tambaram
Thank you for your post. This is excellent information. It is amazing and wonderful to visit your site...
ReplyDeletedata science training in chennai
data science training in omr
android training in chennai
android training in omr
devops training in chennai
devops training in omr
artificial intelligence training in chennai
artificial intelligence training in omr
Happy to chat on your blog, I feel like I can't wait to read more reliable posts and think we all want to thank many blog posts to share with us.
ReplyDeleteData Analytics Course in Bangalore
am more curious to take an interest in some of them. I hope you will provide more information on these topics in your next articlesalesforce training in chennai
ReplyDeletesoftware testing training in chennai
robotic process automation rpa training in chennai
blockchain training in chennai
devops training in chennai
Wonderful information! keep sharing such blogs
ReplyDeleteCareer in digital marketing
Wonderful blog!!! Thanks for sharing this great information with us...
ReplyDeleteSEO Course in Chennai
SEO Online Training
SEO Course in Bangalore
SEO Course in Coimbatore
Great post ! This was actually what i was looking for and i am glad to came here!
ReplyDeletePingFederate Training
MuleSoft Training
SAP Ariba Training
Very nice information.
ReplyDeleteTamil novels pdf free download
Ramanichandran novels PDF
srikala novels PDF
Mallika manivannan novels PDF
muthulakshmi raghavan novels PDF
Infaa Alocious Novels PDF
N Seethalakshmi Novels PDF
Sashi Murali Tamil Novels PDF Download
I am overwhelmed by your post with such a beautiful subject. I usually visit their blogs and update myself through the information they contain, but today's blog would be most appreciated. Well done!
ReplyDeleteMachine Learning Course in Bangalore
thank you for taking the duration to proclamation this find the maintain for an opinion totally beneficial! Bandicam Crack Download
ReplyDeleteprevail! it may be one of the most useful blogs we've ever come across upon the situation. terrific data! Im plus an skillful in this subject matter correspondingly i can take your effort completely dexterously. thanks for the large backing. Quotes On Brothers Day
ReplyDeletekartal samsung klima servisi
ReplyDeleteümraniye samsung klima servisi
üsküdar arçelik klima servisi
pendik samsung klima servisi
pendik mitsubishi klima servisi
tuzla vestel klima servisi
tuzla bosch klima servisi
tuzla arçelik klima servisi
çekmeköy samsung klima servisi
Good text Write good content success. Thank you
ReplyDeletebetpark
bonus veren siteler
betmatik
tipobet
kralbet
slot siteleri
poker siteleri
mobil ödeme bahis
betmatik
ReplyDeletekralbet
betpark
mobil ödeme bahis
tipobet
slot siteleri
kibris bahis siteleri
poker siteleri
bonus veren siteler
DNVOV
çorum
ReplyDeleteantep
ısparta
hatay
mersin
FPV
salt likit
ReplyDeletesalt likit
dr mood likit
big boss likit
dl likit
dark likit
PHWE8
Embrace the data revolution and propel your career forward with APTRON Solutions' Data Analytics Course in Noida. Our expert-led, hands-on program equips you with the knowledge and practical skills needed to excel in the dynamic field of data analytics. Join us and take the first step towards a successful and fulfilling career journey. Enroll today and unlock a world of data-driven possibilities.
ReplyDeleteVery Informative post.
ReplyDeletetamil novels pdf
Tamil novel writers
شراء اثاث مستعمل بالرياض
ReplyDeleteشركة مكافحة حشرات بالرياض
شركة تسليك مجاري بالرياض
شركة شراء اثاث مستعمل بجدة