Saturday, October 24th, we left in the dead of midnight to make the ~5 hour drive to Philadelphia for the NERC Franklin Institute robotic combat event. Although the competition supports up to 30 pound robots, I brought only DDT and Silent Spring because robots larger than 3 pounds were prohibited from using LiPoly battery chemistry. Even still, some of the best insect-class robots in the northeast were scheduled to attend and I predicted this would be the real test before Motorama in the mid-winter 2016.
Since MASSdestruction two weeks ago, the robots received minor upgrades. DDT at minimum received a replacement motor can and pulley since the last one was actually bent from years of abuse. DDT was also set to receive a new frame printed with carbon fiber instead of kevlar as the tension member because it was noted that the weapon shaft bore began to open up from all the spinner-spinner hits.
Unfortunately, the prints failed due to some trickiness in the CF thread and I whipped up a quick solution using two belleville washers on either side of the frame to distribute loads more effectively. Silent Spring felt the success of the upgraded drivetrain but suffered some difficulties in the tournament due to the scarcity of the choice motors. Now Silent Spring will run a OEM option, the Pololu 9.7:1 HP gearmotors. The leftover weight was spent to upgrade the disk. Thin sections that bent at MASS-D were beefed up which brought the disk weight up by 4 oz to about 16 oz.
For an added bit of fun, I decided to use some voodoo magic from the robot gods in this new disk. We were clearing out the crate where Overhaul lives and I decided to pull out the AR400 plates we salvaged at BattleBots off Witch Doctor. While one plate was pretty well bent by Nightmare, the other was relatively flat which made it a fine candidate for a blade. I never did get that green color palette from Mike so I ran it in AR plate's natural color: rust.
At 7:45 am we arrived in the museum and grabbed whatever tables were left. The arena was HUGE and pretty awesome in construction. Double doors for entry and exit, a nice kick plate, and great visibility all around. It left me wishing I brought the 12 and 30.
This time around, DDT drew only direct-drive brushless drums. The release of the new Kitbots "Saifu" kit was probably a large factor in that. This turns out to be advantageous to DDT because the drum standoffs pose a big weakness generally to undercutter weapons. As long as DDT can stay clear of direct hits from the drum, the match should go in his favor over several small hits as the standoffs wear away. As a result, DDT went 4-0 for 1st place in the Antweight division
W vs Saifu
W vs Poco Tambor W vs Revy W vs Revy (finals)
I was feeling pretty good about Silent Spring's destructive capability after MASSdestruction but utilization of that power ended up being its undoing. The unevenness of the floor and massive gyroscopic forces at high speeds meant that stability was low and its first two opponents took full advantage of that. Luckily, enough, Silent Spring was able to survive those outcomes and climb its way through the bracket. Silent Spring clawed its way through the loser's bracket to find 2nd place in a 5-2 record, losing in the finals to Speed Wedge 3, an extremely robust opponent.
W vs Mondo Bizzaro L vs Project Darkness W vs Best Korea W vs Grande Tambor W vs Trilobite W vs Project Darkness L vs Speed Wedge 3 (finals)
Silent Spring definitely managed to bring the pain just as he had at MASSdestruction. Below are some pictures of opponents after matches.
However, the robots didnt escape unscathed either. DDT lost a rear corner screw when Saifu clipped the edge during a gyro dance but otherwise remained unchanged.
Silent Spring suffered a fair amount of injuries from the first two matches and managed to keep it together for the rest of the tournament. In its first match vs Mondo Bizzaro, SS took a blow to the wheel axle which bent the shaft (and made the disk angle weird) but also seems to have seized up a motor. This caused one of the Vextrollers to fail and I ultimately had to use a postponement to replace the drive electronics. But it was the bent axle that proved to be the biggest issue going into the second match vs Project Darkness. Because it was slightly bent, the disk was no longer planar and so I could not spin up without tilting. Ian is an expert driver (in fact he won best driver award!) and took full advantage of this; he drove around SS while it was uncontrollable and delivered some nice hits deep in the UHMW back and got some nice shots on the drive pulleys which ironically bent the OTHER side's drive shaft. One of these hits actually snapped the wheel hub but somehow continued to drive just fine. I dont remember exactly how the match played out, but in the end PD was the victor and SS had to climb through the losers bracket for a second shot. When I was servicing both bent axles I managed to find a sweet spot where the blade was once again flat. Pretty much "OMG DONT TOUCH IT EVER". In its battered state, it was able to deliver the big hits and crawl back up to the finals without accumulating extra damage.
DDT can continue to compete as is but Silent Spring needs significant repairs to bring it back to a reliable state. Since it keeps doing so well, I must once again delay its retirement even though I want to build something else. I'll assess the extent of upgrades to be received in time for the next competition, MASSdestruction, in December. See you all there!
Not too long after the Dragon Con bouts, the crew went right next door to the Artisan's Asylum in Somerville, MA to fight at the first ever MASSdestruction event. As the date came closer, more and more robots registered which helped fund the brand new arena that Rob Masek put together. It was shaping up to be a world-class event.
I brought DDT and Silent Spring with me; neither bot had major upgrades since Dragon Con. Silent Spring received an updated drive train which in turn required re-fabrication of a few critical components. I decided to dump the 33:1 Spark gearmotors in favor of my KW hackmotor which are the drive units I used in Dominant Mode. You may recall, they consist of the KW beetle motors (which are now discontinued) mated to a ~10:1 spur gearbox from the "1000 RPM" gearmotors. Not only is this combination lighter, but it is also faster and more powerful (1500 RPM @ 12V). This change gave Silent Spring the agility it desperately needed to be competitive and deliver the big hit. These tests on an empty Stratasys material cartridge are evidence of its new destructive power.
Saturday morning, Lucy and I hitched a ride with Will and Max Bales who brought a few robots of their own. These included the last minute Hyperderp, lovingly named Turd Ferguson, and Hypershock as seen on TV. All our bots combined, we had 10 ants and 11 beetles. To keep matches rolling consistently throughout the day, Rob proposed a modified swiss tournament structure. All robots will have ~4 matches and points will be awarded for the conditions of the match.
A win is 4 points
A win by default (no-shows or forfeits before the fight) is 3 points
A loss is 2 points
A double loss (where both robots stop functioning) is 1 points
A no-show is 0 points
The top four robots in each weight class are then pitted in a semi-finals double elimination scenario to fight for 1st, 2nd, and 3rd.
In the end, DDT had 6 matches and went 4-2 for 3rd place. Silent Spring (in a weird turn of events) had 5 matches and went 4-1 for 1st place. The tournament results are hyperlinked here. Only a few matches have video from what I can tell. I will update this page periodically with embedded video as more pop up.
Overall, I am satisfied with the performance of the robots. DDT performed well (never stopped!) but was shown some glaring weaknesses to particular wedge designs. In the future, I'll need to practice driving and prepare special blades to handle these types of wedges. Silent Spring STILL suffers from random shutoffs which is incredibly infuriating but before it fails it delivers some of the most impressive blows I've ever seen in a beetle.
Before Franklin Institute, I'll be looking to redo the wiring and improve its overall reliability. One area that needs improvement is the blade durability; in this event I managed to bend both blades I had for Silent Spring not out of plane (say from a vertical spinner) but IN PLANE. This means its own hits are so hard it damages the disk. I would pay $$$ to see some high-speed video of the blade warping under impact! Stay tuned for 10/24 to see how these two bots shake it up at Franklin!
I didnt have a chance to write up the Bot Blast 2015 event report earlier this year July, but if I did I wouldnt actually have much to say. Neither DDT or Silent Spring did very well and amounted for a total W-L of 2-4. Furthermore, DDT's frame was done for and I saw this opportunity to revisit some of the design creeds that I'd been touting for for the past year such as the "big weapon entertainment" and "indirect drive". These concepts are good for entertainment value and long-term reliability but are not necessarily the key to win fights. With a bit of TV appearance, I had a target on my back and many builders would love a chance to prove themselves against one of the "cream of the crop" robot builders as described by the Battlebots founders. I dont mind this one bit, but if this is the case I better live up to the hype. And so starting with DDT, I will evolve each robot in my fleet.
A New Design
DDT v3 Isometric View
Recently, Charles purchased a Mark One 3D printer from the company Mark Forged. This printer is unique because it has the ability to embed CONTINUOUS strands of fiber (fiberglass, kevlar, carbon fiber) within each layer of its print. Although it cannot place fiber in the vertical build axis, this is a monumental improvement in tensile strength. In addition, it prints nylon as its base material, which is mechanically superior to ABS in our application. To further demonstrate the capabilities and applications of their technology, I have elected to print DDT as a nylon-kevlar unibody.
DDT v3 Unibody CAD
Designing for a unibody frame is a bit challenging because many details about the parts, their connections, and their assembly order must be known ahead of time. CAD became an invaluable tool in this process; each part was modeled with excruciating detail and a detailed assembly order was developed for the rear component bay. I fully realize that this design is not optimal for 3D printing and perhaps I can explain in another post if people are interested. The reasoning for the design of the trusses were add-ons to stiffen long or thin features. A better design would have made the robot more blocky but would have been aesthetically boring in my opinion.
DDT v3 Internal View
DDT kept its unique shape and trademark "huge-ass blade" but with a few modifications. First, the blade size was reduced to 6" (instead of 6.5"). This decision was made to free up some weight to be allocated elsewhere, specifically the ribbing to the blades. I had two blades made for DDT v2 and both of them were horribly bent after the year or so they have been in service. The newer blade design beefed up the sections by about 1.5x and were still lighter than the old blades.
The new blade stacked atop the old blade demonstrates their difference in diameter
Second, more armor was added to the body. This decision was made after the number of hits to the pulleys and wheels. The frame parts would be thickened overall and side armor will be included. Third, the indirect drive was ditched in favor of direct drive to 22:1 silver sparks with cushy foam wheels. The small brass micro gearmotors proved to be unreliable and the ratios I was using were far to mild to be maneuverable. The original DDT used roughly 20:1 gearboxes and had superior mobility. Finally, the blade material was changed. This time I wanted to use prehard materials because my attempts to harden were subpar. The standard 6" blades were waterjet from 60C hard 1075/74 spring steel. An alternate set of blades were made for specific types of opponents. These were also made from different materials and had different geometries.
Standard Blade (left) and Bash Blade (right)
Fabrication
The frame took nearly 36 hours to print! The printer is currently admittedly slow, especially with the addition of fiber. While the frame could certainly have used more fiber, I decided to optimize for more "height" of fiber than depth and so all layers had fiber but only select layers had full layers.
DDT v3 unibody frame as seen in "eiger"
DDT v3 unibody frame as printed on the Markforged Mark One Printer
The frame needed some cleaning to allow the proper fit of parts. Any undercut features were finished with a rotary tool sanding bit to clean up areas were support structures were placed. This was critical for the drive motors, screw holes, and other components to be placed.
Fingertech Spark gearmotor embedded into the frame
The critical electronics were packaged into a small cube that I designed using my expert level tetris skills. This small cube contains an Orange RX receiver, a Turnigy Plush 10 ESC for the weapon, and two Vex 29 motor controllers for each spark motor.
DDT v3 electronics cube contains three ESCs and a receiver and is about 1" x 1.125" x .75"
The electronics cube is intended to fit in the frame like so.
Placement of the electronics cube within the frame
The motor was recycled from v2 and the robot was wired. No dedicated power switch was used since I have had bad luck with the Fingertech switches lately and was feeling skeptical; in lieu of this, I elected to use a direct connection to the battery.
The blade and pulley interface were modified as well. Instead of placing the bearing directly within the bore of the blade as done previously, both bearings would be placed in the hub and the blade would be bolted to the pulley. A round feature on the pulley would mate the blade concentrically with the pulley. This method is better because it allows the blades to be swapped without disassembling the entire shaft assembly, it reduces misalignment because the skew is no longer dependent on the alignment of the blade and pulley, and it reduces the shock of the bearings by placing a softer medium between the bearing OD and the blade.
Illustration of the blade-pulley interface
Lastly, side armor was made to fit wrap around the sides. These were cut from 0.0625 polycarbonate which is tough yet flexible. However at this short length and thickness the sides were difficult to put on and heavily preloaded. I do not have especially high hopes for these; in anticipation, I made several copies.
DDT v3 with an older 4130 Blade
DDT v3 featuring the newer 1074/75 blade
Final weight was 15.5 oz! A very comfortable weight and some wiggle room to improve.
Preliminary performance
DDT had the opportunity to smash a number of items. However none of them actually weighed a pound. Still, these tests demonstrated remarkable damage to UHMW, aluminum, and even other 3D printed Nylon parts. I couldnt think of a better way to send off the v2 frame permanently!
Dragon Con 2015 Microbattles
DDT v3's debut was at Dragon Con 2015 where it had four matches and went 3 wins, 1 loss. I am extremely happy with its performance and the resiliance of the printed frame. I half expected the weapon shaft bore to open up after so many hits (including arena wall hits) but it remains as true as when it was first made, probably due in part to the heavy kevlar fill around the critical dimensions. DDT's fights are embedded below. I was very lucky to not fly out of the pit on several occasions but unfortunately my luck ran out when a solid hit on Algos sent DDT flying into the pit.
DDT took some damage from Green Reaper when he climbed over the blade and began chewing on the frame. I was surprised to see that not much damage was done but only because my blade was keeping him from pushing into the frame otherwise more damage would surely have been done; some of the fiber is exposed which means he got about 0.6 mm deep. Both of the wheel guards exploded against Algos but I was able to leave a nice mark in his 0.0625 thick Ti before flying out.
Post-Algos picture
Green Reaper damage
Damage to Algos
Bent Ti side on Algos
I want to find more opportunities for DDT to challenge other antweights. There are two competitions nearing in October; I will try my hardest to bring DDT there. Stay tuned!
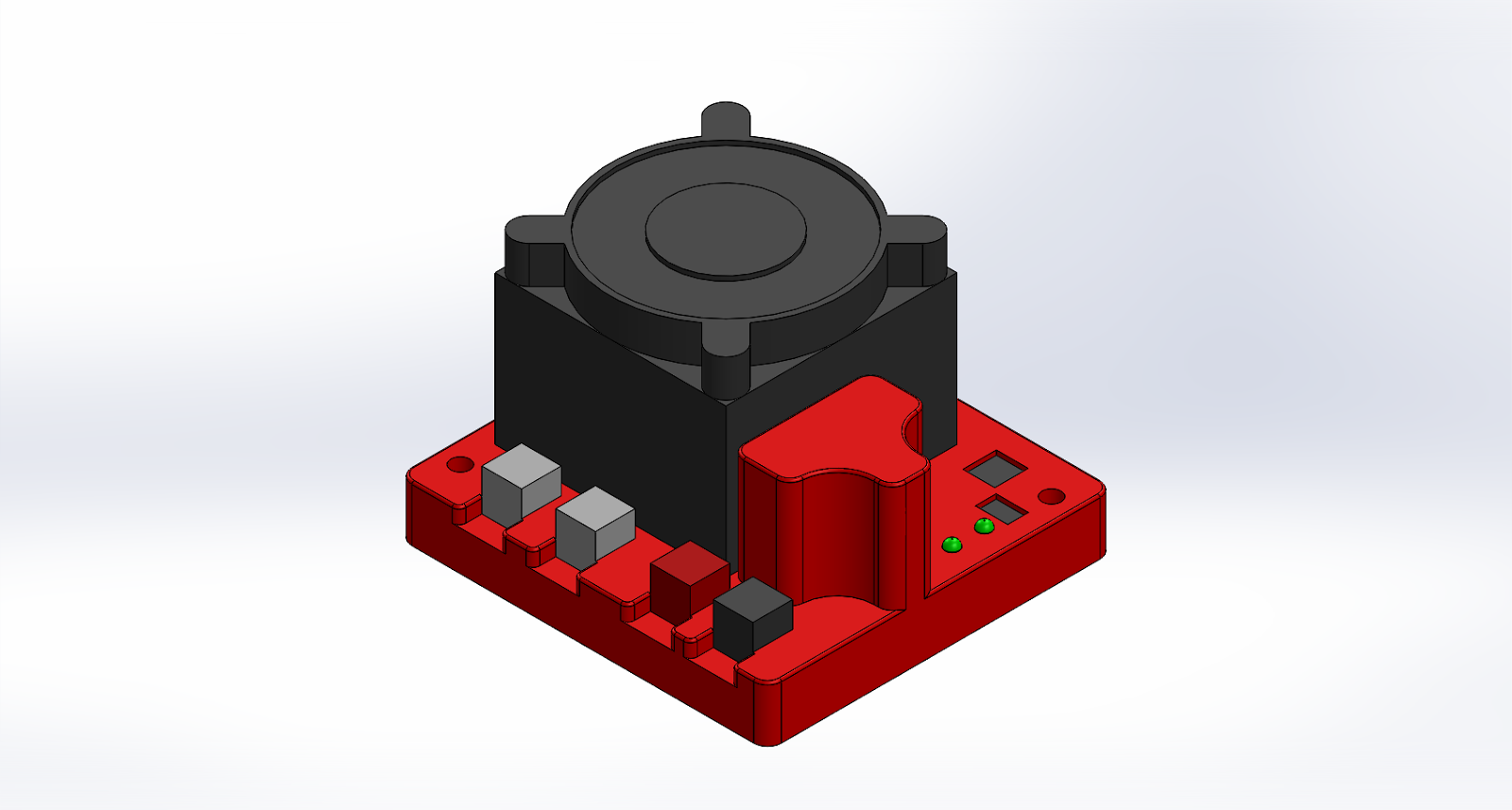
After coming back from Battlebots 2015, I am DEFINITELY feeling the big bot bug. I began playing with some concepts for robots but, as you know my design style, noticed a 3D model for the Robot Power Vyper ESC did not exist. So I made one off the physical item courtesy of Charles Guan and make it available here.
So here it is. The actual dimensions ARE larger than the advertised size online. My guess is the fan on top adds some height. I may have added a shameless plug on the bottom side, hehe (feel free to remove it). Charles has more details on the internals. Here is a 3D printed version of the STL model. Not too bad?
Motorama may very well be the toughest combat robotics competition in the entire Northeast. With that said, it is very difficult to place in any weight class. By chance and skill, I was able to place in two weight classes of three entrants! G3 Robotics was able to end with a respectable 10 wins and 4 losses. See the bot specific breakdown.
________________________________________________
Silent Spring
No place (3W - 2L)
Finally here Saturday morning and still no name for the beetleweight DDT clone. Despite the controls oriented suggestions given by other builders, my friends agreed to Silent Spring, the name that Nate Franklin had originally proposed. Once I explain the reference people think its clever >_>
Regardless of the name SS's day started out rougher than most. During safety, the drive motors would not shut off! I traced the issue back to the receiver, which does not appear to support failsafe protocol on the elevator and aileron channels. Broke a few wires swapping back to the reliable OrangeRx 6ch receiver but that was quickly handled by butchering a bind plug. SAFETY ALERT! THE 3CH S.BUS RX DOES NOT PASS FAILSAFE!
Silent Spring v Rmr
Soon we were ready to fight and SS pulled Rmr, a fellow MIT bot from MITERS. This bot featured an overhead spinning bar and an O-ring track system for drive.
The fight was against his favor since my blade could reach under his blade to land hits on his body without hit myself. However, without ANY driving practice on SS, It would be very easy to over travel after a hit where Rmr could get my sides or even a wheel.
Because of that, I played on the cautious side and took smaller pokes. One of the first few glancing blows actually did result in him landing a body shot, but without critical damage I was able to continue the attack. Still, some nice scars there.
Silent Spring v Time Warp
Now hearing I would be fighting the modified Trilobite kit, I decided to take my time in repairing the drive belts which appeared to be loose in my first match. I would need every ounce of maneuverability to escape this bot. On top of the Trilobite base, Time Warp featured an angular plow from what appeared to be welded and treated steel. There was no way I could bite through that plow but as it would have it, I didn't need to.
I spun up to full and decided to focus on keeping the blade forward. Time Warp came to me with the plow first and after several big hits the pins keeping the shaft on gave up and the plow came off. If it didnt break at the collar, it might have broken at the beak. Small cracks were beginning to form.
However the blade had slowed significantly by the end. I had not received any visible damage but I could not spin up the weapon. This time dependent shortcoming would plague me for the rest of the tournament.
Silent Spring v Devastating Moment
Joey and I had once fought antweights in 2008. His Swamp Woman vs my DDT. DDT managed to get the better of that one but only because SW was an unweaponed bot. Now Joey had a Weta kit with a custom steel eggbeater. It sounded mean!
Unlike In the Margins (Weta Killer), SS has a thick blade which is better for big hits and less effective for chopping or grabbing. I would only be able to get good hits on hard surfaces and so instead of aiming for the feet, I aimed directly for the weapon bar.
I was essentially relying on the robustness of the robot mechanics since at this point I had not sorted out the weapon ESC issue. If I stopped spinning it could be over for me. I got lucky this time when he shut off unexpectedly after two big hits and couldn't continue.
Speed Wedge 3 v Silent Spring
I met Ian this year when I spoke to him a bit in the pits. It didn't take long for me to realize a quality builder and solid competitor. When I pulled this match up, I predicted a loss immediately. With the spotty ESC and his driving skill, attrition would work against me. Well, I don't need to say much more do I? Loss by judges decision :P
In the Margins v Silent Spring
AHHHHHHHHHHHHHH WHY DID I HAVE TO LOSE. The most horrible match up pits friends against friends in the loser's bracket and its not even the finals! Last time Aaron and I had fought was actually last year where we went 1-1 against each other in the total annihilation of Dominant Mode.
This year we both built bots to last. Plastic construction, horizontal disks. It was shaping up to be a good match... but ended up pretty sad. Two soft hits in, my power switch opened up and SS turned off. Slim got a nibble on my wheels afterwards. Ah well, Aaron will have to carry the flag for the both of us (but ended up losing to Speed Wedge 3 also :/)!
Beetleweight Rumble
Immediately after the In the Margins match, I put SS into the rumble. Literally, re-tightened the fingertech switch and threw it into the box. I used this time to play with the throttle a bit and see if I could discern the cause of the ESC problems. It looks like if I keep the weapon at max the entire time it will power up quite alright.
That was it for Silent Spring. A solid robot with great potential, hampered by some bad electronics. Without another competition in the near future, I'll have plenty of time to figure this issue out. For the time being, Silent Spring has succeeded in its primary goal: Be entertaining and don't get destroyed :)
________________________________________________
Attrition
1st Place (4W - 0L)
Having started so far in advanced, Attrition's check-in was straight forward. For the rest of the competition, all I ever had to do was swap out batteries and decide whether to use the wedgelets or not. All these upgrades paid off and made Attrition a clear winner this time around.
Attrition v Maul
Maul was another bot that came out of MITERS but one I had not seen before. Partially because I don't frequent MITERS much anymore but also because I was led to believe the robot was still being completed at the event as it was safety checked immediately before the match. - _ -
It appeared to be some sort of thwack bot with cutting tools for wheels. The chassis was made from a rather thick steel pipe and there wasnt any chance of going through it. So, I opted to punt it around until he tapped out.
Attrition v Hyper Drive
When Cataclysm totaled Apollyon in 2013, part of me cheered just because I wouldnt have to face this legendary wedge bot in the future. However, Mike sold the bot to master craftsman Jerome Miles who then put the drive setup from his 60 lber into it and renamed it Hyper Drive. Oh dear.
Hyper Drive is an appropriate name. It has two massive inrunner brushless motors coupled to dewalt gearboxes for drive. It could move and spin fast enough to do reasonable damage in a thwacking mode. If it were more controllable, he could totally dominate this match.
I decided to play it safe. Start with low drum RPMs and gain maneuverability. I also put on the short wedgelets to help with his front wedge. Shortly into the match, HD lost one side of his drive (gearbox slid out) and I was able to flip him over using the wedgelets. How inverted and nearly immobile, I turned up the drum to full to try and lay on the killing blow. That hit took off the wheel on his good gearbox and Jerome tapped out.
Attrition v Isotelus Rex
Here we are! I finally get to fight my pushybot rival! I knew ahead of time that he would be using the snout again, so I best optimize for driving. Therefore I employed the same strategy as I had against Jerome in the match previous.
Things were going according to plan. I was able to dodge out direct attacks from the snout and lay some pecks on the Ti guard. A few flips went in my favor to added aggression points. Occasionally the drum would contact the snout and I actually noticed white plastic flaking off into the arena. At this RPM (and perhaps because my teeth were still sharp) I could bite into this snout instead of being deflected by it. I started going head on into whatever angle I could and was still able to toss him about.
For the last 30 or so seconds, I turned up the drum again like I did against HD. At this point there was enough damage to the plow to render the snout ineffective. Some showers of sparks and a few more tosses for good measure to start strong, end strong, and give Attrition a shot at 1st this year.
Attrition v Isotelus Rex (FINALS)
Isotelus Rex and Ripto fought a close match in the loser's bracket finals. Amazingly, Isotelus Rex came out the winner after 5 mins or so of judges arguing. I figured I would run the same strategy as the first time I fought him but it turns out it was not needed. He suffered damage to his gearmotors in the match previous and was unable to make the repairs in time. This left Isotelus with one drive, which severely handicapped his awesome driving power. After a few hits, he tapped out and Attrition was crowned the 12lb champion!
Motorama couldnt have gone any better for Attrition. Progressing from 3rd, to 2nd, and finally 1st was a hard battle through the years but taught me many things about robust designs. I am happy to say everything I learned about engineering was well worth it and demonstrated in this little robot. Next year I hope to fight against my other rivals in the division such as Ripto and Cataclysm. This will be the true test of this robot.
________________________________________________
MegatRON
2nd Place (3W - 2L)
With a tightened clutch and new dustpan, I had hopes for Ron at least as a pushybot. It has been forever since I had driven a non weaponed robot and in particular my old old design from my childhood. We would see what the future holds this year at Motorama
MegatRON v Candy Paint and Gold Teeth
The first match was ALSO against an MIT folk! I felt like they were trying to phase us out from the start! Even worse, it was against my buddy Charles and his mean overhead bar spinner. He told me he was going to spin slow and have fun. I obliged but encouraged him to make it entertaining as well. I put on the abrasive saw to make sparks but not penetrate his aluminum frame.
He did not disappoint. At the speed he chose to spin, a slight pertubation from Ron's dustpan caused him to flip over. However, he had enough torque to Tornado-mer dance! What followed was nearly 3 minutes of watching CPGT try to self-right with the occasional Ron interjection with the saw blade. Eventually, Charles burnt out his motor and CPGT was counted out.
There was some damage after the match! CPGT was wailing around Ron so hard, that one of the cast aluminum pillow blocks actually shattered and left the arm in danger of a single supported system. I was quickly able to hack a solution together by taking my spare P60 gearbox face and using it as the far end pillow block.
A very expensive pillow block - _ -.
MegatRON v Whammy Bar
Whammy bar looked to be a deadly horizontal bar spinner. What made it scarier, is the fact that nobody has seen it hit anything yet! Alex tapped out early in his fight with WB before they could make contact so I will be the first to feel its teeth.
I went out to box rush him but missed! Argh! He was able to get up to near full speed when we made contact. The Ron took the hits like a champ but WB could not. Somewhere inside his robot, a component popped loose and WB stopped moving. Ron, and his ineffective saw, moves on :P
Damage pics! That penetration!
Whammy bar adds a nice dent on the inner of one pontoon
MegatRON v The Magnificient Poncho
I've always been impressed by Poncho. It is such a simple robot but with power and good driving it can conquer the toughest opponents. Earlier in the competition, Poncho defeated last year's champ Triggo. I will have to break out my best driving to stop him.
I used a lot of spin tactics to deflect his charges since I knew a head on collision would most likely be against my favor. I had a wide wedge and sloped sides that could be used to scoop around his pushing angle. This was effective for getting under him.
In the second half of the match, I was noticing a lot of over steering in my driving. I could see from my driver's stand that my one side of wheels were free spinning! Ah! the banebots keyway had stipped out! Luckily I could still drive a bit but I was definitely trying to just outlast poncho at the end. We got stuck together twice which helped in stalling for time. (normally I would able to spin him out of the tray if I had both drive sides...) The judges voted in my favor and MegatRON goes to the finals!
Some pictures of the wheel casualties.
4 old megatRON wheels. Since last year.
Banebots keyed wheel sheared section.
Thankfully, Jerome was nice to give me two replacement wheels. they didnt match the 40A's that I had as spares, but they would work for now. Thanks Jerome!
MegatRON v Triggo (FINALS 1)
Oh man, it is finally time. Many people would fear fighting Triggo but to be honest I wanted this fight to happen. As soon as Triggo was announced over Whammo, Charles and I had actually cheered.
I knew this fight would be among the hardest I've had in awhile. And to not drive a weaponed bot make it all the more exciting. There is some thrill in depending on skill. Being the robot that could be destroyed, trying to outlast the stronger robot. That is what I was looking forward to and that is what I got.
Starting out a bit tentative, I let him spin up a bit because I thought the dustpan was steep enough to deflect him. While that worked for a bit, he caught the right corner of the dustpan and spun the bot around catching another edge and flipping Ron. I had the clutch relatively loose to prevent stalling the motor but in this case it proved harmful as Ron could not invert. I had to tap out to save the robot before Triggo's next attack.
MegatRON v Triggo (FINALS 2)
This time, I went as hard as I could. A solid box rush from the start slowed him but not enough to stop him. From there I had to stay on him as much as possible and keep him off his toes. A careful balance of poking with the wedge would tilt him and force him to spin down or lose control.
However, the two hits from the previous match took its toll on the dustpan; it was slightly tweaked on the right side and could actually go over the shell as he teetered out of control. During these times I was unable to control Triggo and wasted a lot of critical moments.
Finally I was able to herd him into a corner but... Ron stopped moving! ARGH! He crapped out in front of my drivers corner so I could see that the powerlink (an XT60) was much much higher than it was supposed to be. Meanwhile Triggo was slamming himself into the pan and into the walls to push himself free. When he finally escaped, I tapped out to prevent a juicy juicy free hit on the arm.
People tell me I was winning that match but I didnt really care. it FELT EPIC! And that feeling alone was satisfaction enough. MegatRON would take 2md place to the 2014 champ Triggo. No shame in losing in the finals to a spectacular robot.
Triggo, the 2014 and 2015 Motorama 30lber champion
MegatRON after the 2nd triggo fight
Triggo nibbled at the wheels.
.. and did damage to the dustpan
The right side corner which was already raised was further chewed by Triggo. The left side is still pristine!
To conclude this post, I'd like to shout out to the many many people who made this event a great success, a great time, and overall made the experience of robot combat a wonderful idea. First is my bud Charles Guan, who I give credit to for the numerous resources and help used in building my bots. He also drove the group of us through the snow to get to Moto. None of this would be possible without you man! Then I'd like to mention the MIT and GT crew for a friendly competitive atmosphere and help in repair time. I find that things are most fun when you have your friends and robot fighting is no exception. Not to mention their unyielding support. Xo, Aaron, Gabe, Chad, Adam, Dane, Charles, Paige, Cynthia, Rebecca, Ciaran, Ian, and James here is to you! And I really really hope I didnt miss anyone. I would also like to note exceptional builders who made it a really great time. Zac, Mike, Alex, Kyle, and Jerome were kind enough to offer me parts and help in times of repair. And most important are the folks at NERC who kept the show running. That's Ed, Beth, Jon, James, Kyle, Rob, and Mike and many many more Im sure. Thanks for making Moto one heck of an event!.






























































{kind=link}
{kind=link}