Last time we discussed the improvements over Safety Razor v1.1. Where are we now? Well in Atlanta Maker Faire build blitz, I built the entire thing. Lets see what images I can scrounge up.
Seeing as how there were 1-2 weeks until the event, I broke down construction into two main parts: frame and hubmotor. Ive attempted building a hubmotor several times, but never finished them. I'll be paying special attention to the motor this time.
First came the turning of the wheels. The front wheel included two facing operations and two counter boring operations for bearing recesses. The shaft was also turned from a round of 1-5/8" billet.
A stator was salvaged from a Turnigy motor. It measures 52.84mm in diameter and is planned for about 20-25 turns a tooth as described in the last post. The shaft was machined by our resident expert machinist Stephen Culpepper. A light application of glue held the motor in place.
Ever since I learned how to properly set my working zeros, my parts have come out drastically more precise with better finishes. The endcaps were First waterjet machined from 5/8" plate and then turned on the lathe. While mounting the plate on the cutting table, I realized I ordered 3" wide flat for a 3" dia part.
Luckily, I am a boss. The advantage of waterjet cutting first allows me to add through holes and a tentative bore. This way, I wont have to mount the disks on a rotary table to drill the holes.
Magnets installed. Each strip is actually composed of two magnets for a total of 28 magnets. It works, but is irritating for slow settling glue because the field on the edges repel each other.
I also spent this moment to waterjet the magnet flux rings. These were cut from 1/2" A-36 plate, epoxied together to make a total stack of 1.5". Anyway, back to the endcaps.
Partway complete.
These are probably the best pieces I have turned in my entire robotics career. The only surface I wish I could have treated were the outer edges of the flange as it still has the water jet's frosted edge.
Two endcaps with bearings were press fit in the bore of the wheel. Inside lay the waterjet style flux rings. A waterjet scrap of 3/32" polycarbonate served as a sensor mount. I figured this convenient in case I wanted to manually advance the timing of the motor.
Glued...
Wired...
Installed.
The rather large and wide front wheel of the scooter would need a custom set of front forks to account for the 2x width. Luckily, the Razor A2 frame has a "shock mounted front" aka block of rubber and hinge. I took this opportunity to create a custom mating piece that has shock absorption and a wider section.
A block of aluminum was first water jet machined to rough dimensions and finished on the mill. The raised section in the back limits the backwards travel of the hinge, the 5/16" hole is the hinge point, and the 10-32 tapped holes mate to parallel plates to facilitate the wheel.
The frame went together as quickly and easily as the old one did. This time I spent time to open up the width of all the slots by .005" such that I would have to do less sanding later. I also decreased the kerf compensation from .015 to .012 on the waterjet. The combination of both along with the use of a scrapper produced a very clean tabbing. I don't have to hammer anything together, but instead they press lightly together. The appropriate frame parts were mill mounted and drilled as needed. First a spot drill, and then a sharp 3/32 to finish it up.
Repeat. The frame at one point in time looked like this:
The main rails were together and it was beginning to take shape. A day later:
It looks much more sleek than Safety Razor. Looking at it, you could barely tell it was electrically assisted at all. Let's compare it to Safety Razor:
By late Friday evening before the Maker Faire, the lot of us grew lazy. I was intending to waterjet the throttle pieces from 1/4" Aluminum, but Charles convinced me to start rapid prototyping the remaining parts.
Among the throttle, the fan covers and charge plug covers were also printed.
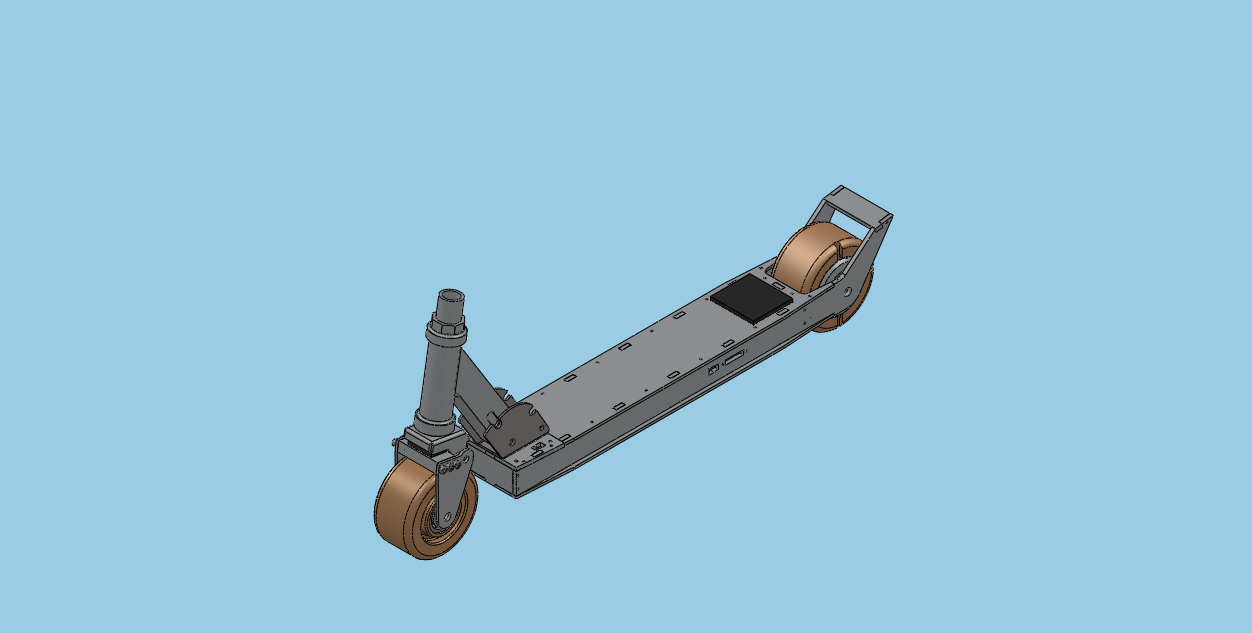
The final product! Now presenting Razor Wind!
So how did it work? Well it worked well for about 20 minutes before failures began. The main problem lay in the motor. The motor seemed under specified for the amount of load required. I decided to opt for 20 turns of 20ga wire because I wanted speed, originally thinking the speed controller could throw enough current to through the motor to meet the requirements dictated by the sensors. However, this caused the motor to heat up very quickly. The heat, combined with the motor torque broke the glue joints and allowed the motor to rotate around the shaft. This effectively ripped wires apart internally and shorted some connections. The motor went up before the Maker Faire.
Razor Wind still served as a great display item along with the still functional Safety Razor. We also had some surprise scooter-wielding guests.
I have since then rewound the motor with 22ga wire and machined a small nail to act as a roll pin for mechanical locking. I am convinced the real solution would be to increase the voltage or overall size of the motor. My next solution, involves some number of these:




















































{kind=link}
{kind=link}